


本記事は
下にある記事の続き物だよ
ただ、そこまで深いつながりはないので読み進めても問題ないよ⇩今回使用しているボーンについての記事
⇩ちょっとだけ内容が出てくる記事


こんにちは!ウンパッパです!
今回は
「コントロール リグ」を適応して「1つ1つの階段や段差に足を置けるようにする」よ!
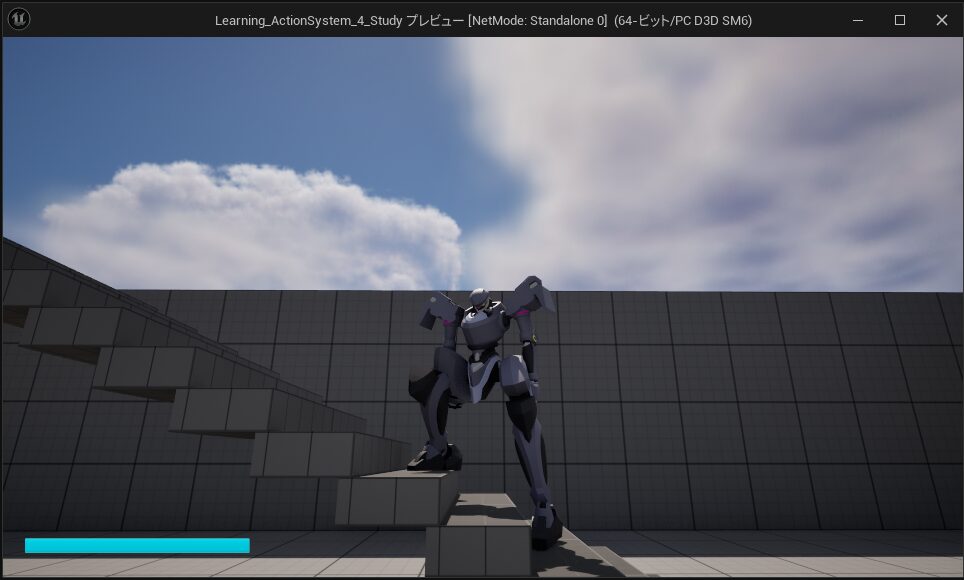
まずはどうなるかを見てみよう!
オリジナルモデルのロボットが、階段の段差の1つ1つに合わせて足を置いているね
本来ならややこしいシステムを仕込まなきゃいけないこの「自然な段差歩き」を
ちょっと設定するだけで簡単に作ることが出来るんだ!
やり方を軽く説明すると
1.「Foot IK専用のボーン」を生成
2.作った「専用ボーン」をアニメーションBPにある「Control Rig」に割り当て
たったこれだけで「Foot IK」を有効にできるんだ!
それでは早速作っていこう!


「Foot Ik」を適応する場所を確認する
まずは「Control Rig」を付けるための「場所」を確認しよう
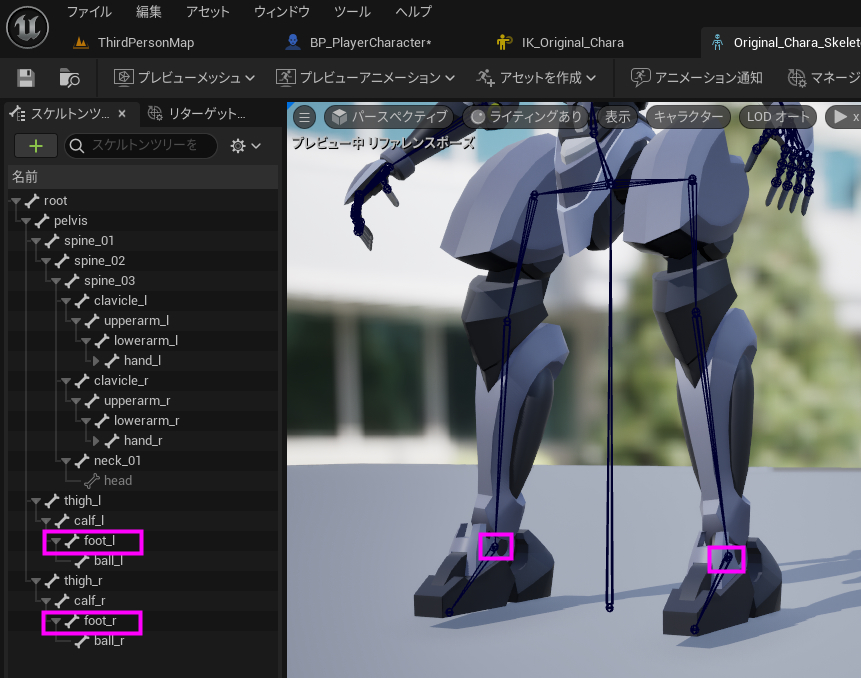
モデルのスケルトンにて
- 「foot_l」
- 「foot_r」
の位置に「Control Rig 専用の仮想ボーン」を生成して
それを適応するよ
仮想ボーンを付ける
確認出来たら、「Control Rig 専用の仮想ボーン」を生成しに行こう
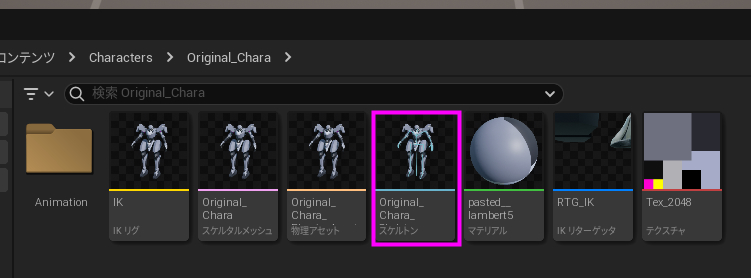
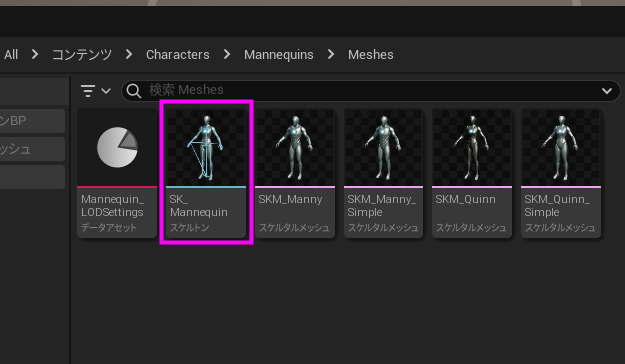
まずは「コンテンツブラウザ」にてオリジナルモデルの「スケルトン」を選択
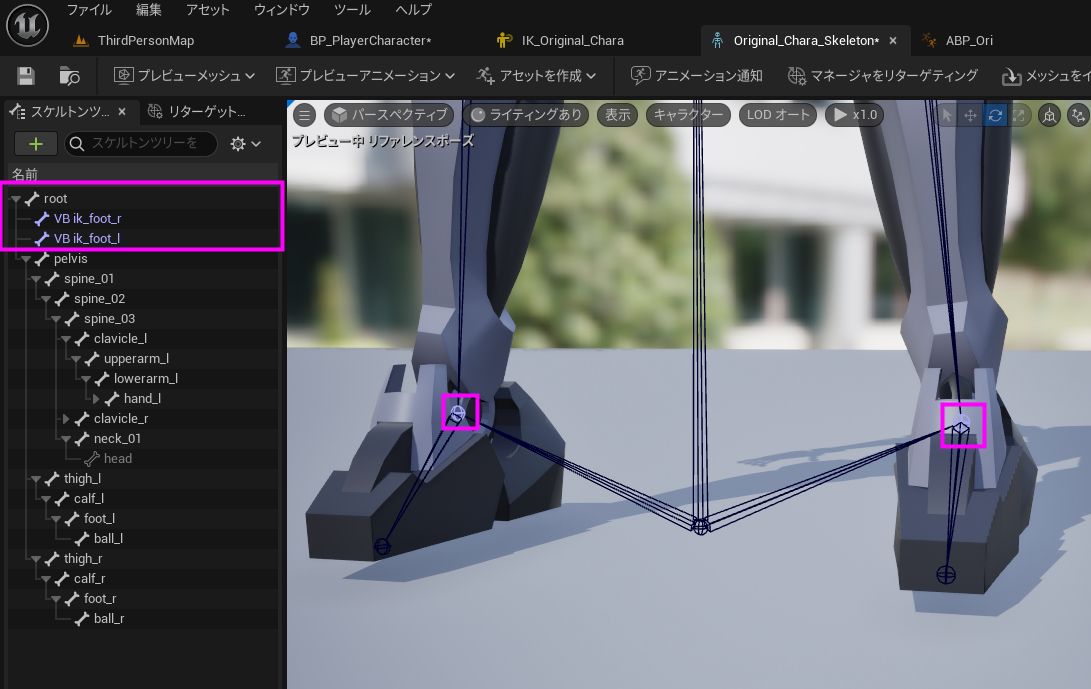
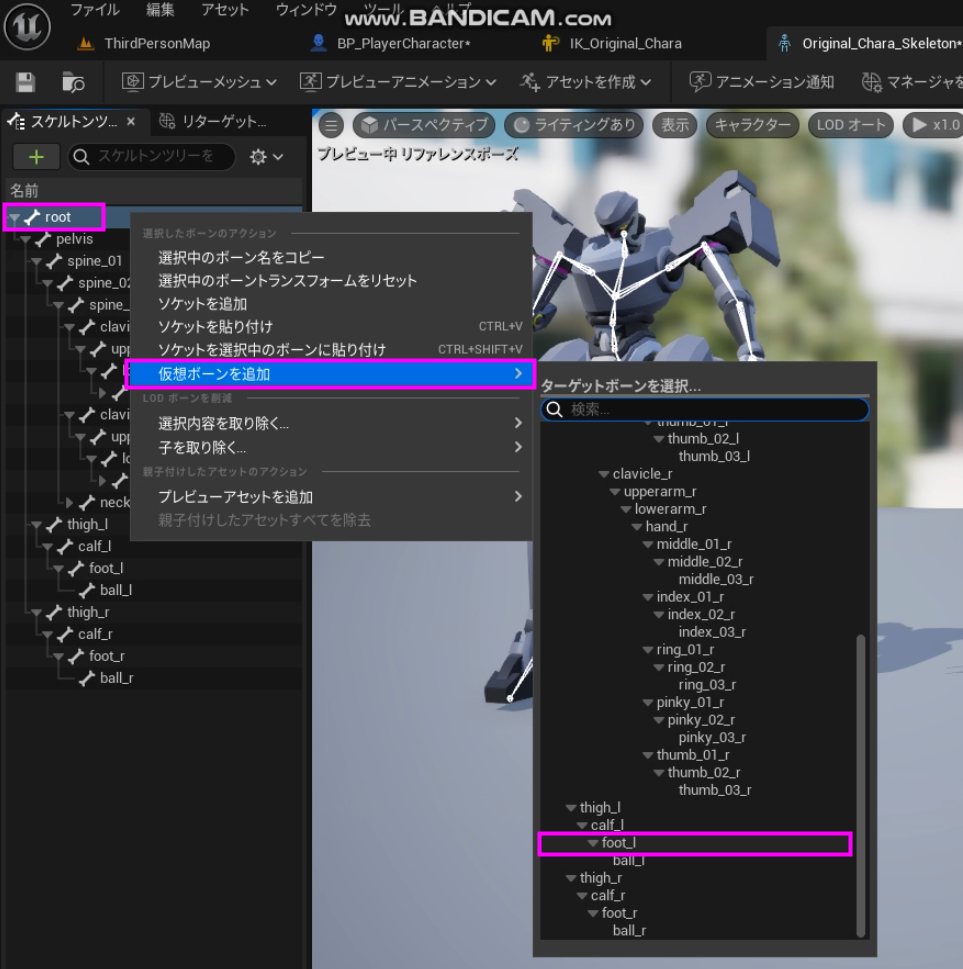
開いたら、ジョイントの「root」を選択して「右クリック」を押し
「仮想ボーン」⇒「foot_l」を選択
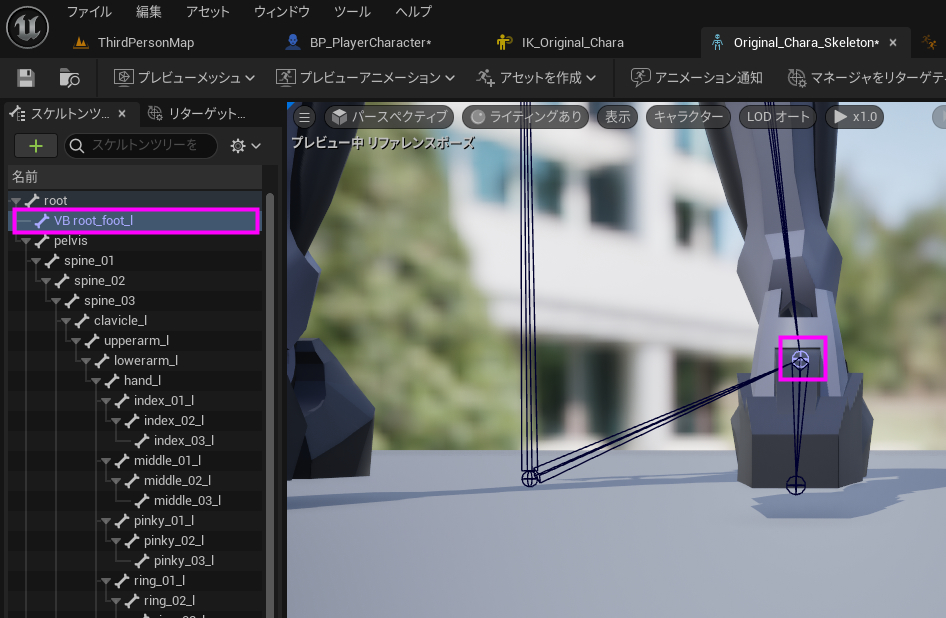
すると
「仮想ボーン」である「VB root_foot_l」が生成されるよ
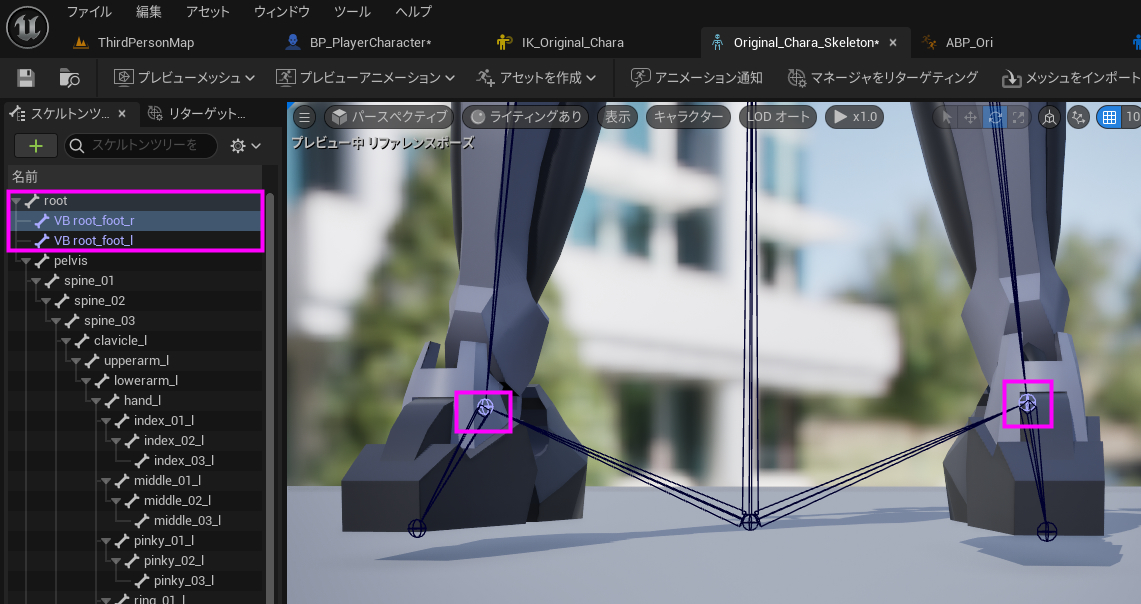
生成されたら次は「foot_r」も同じように捜査して「VB root_foot_r」を生成しよう
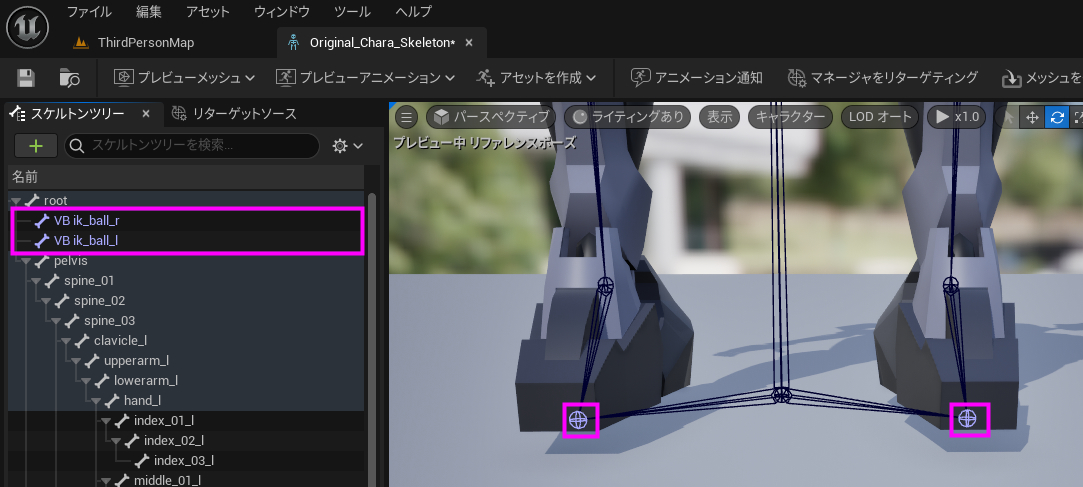
出来たら名前を変更するよ
こんな感じに名前を変えてね
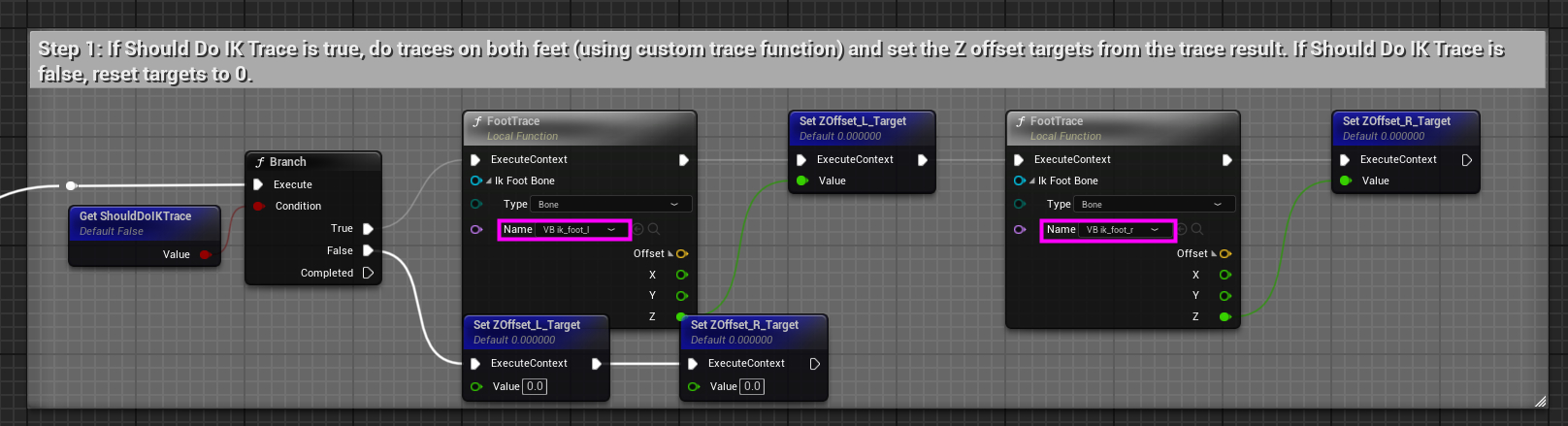
「VB root_foot_l」⇒「VB ik_foot_l」
「VB root_foot_r」⇒「VB ik_foot_r」
出来たらこれでOK
「VB ik_foot_l/r」は、以降も名前を使うので覚えておこう
失敗談:「ball_l/r」(つま先)につけるとどうなるか
よくある間違いとして「ball_l/r」に「仮想ボーン」を付けるというのがあるよ
もしこの状態を気付かずにそのまま作業を進めていくと…
足がおかしな方向に曲がる

とてもよろしくないので、間違えないよう気を付けよう
ちなみに僕は1度間違えた上で
再度ブログを書くときにもう1度間違えたゾ…
「foot IK」と「IKリグのIK 目標」は関係ない、これを念頭にしっかり置こう
アニメーションBPでコントロールリグを付ける
次は「アニメーションBP」にて「コントロールリグ」を有効化
さっき付けた「VB ik_foot_l/r」を適応するよ
まずは「アニメーションBP」を開いてね
開いたら、「オリジナルモデルにスケルトンをリターゲットしよう!その2」にて外していた
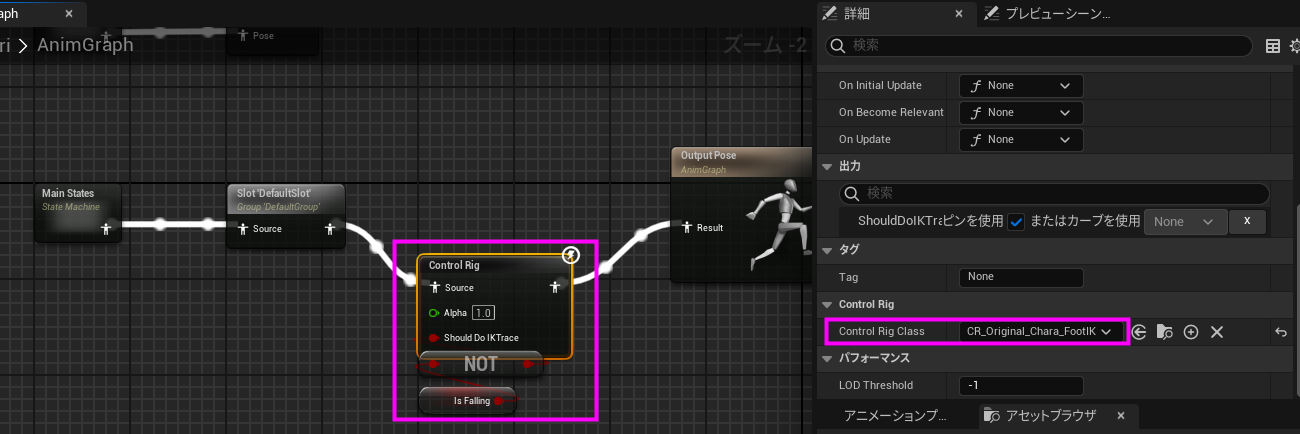
「Control Rig」ノードを付けなおそう
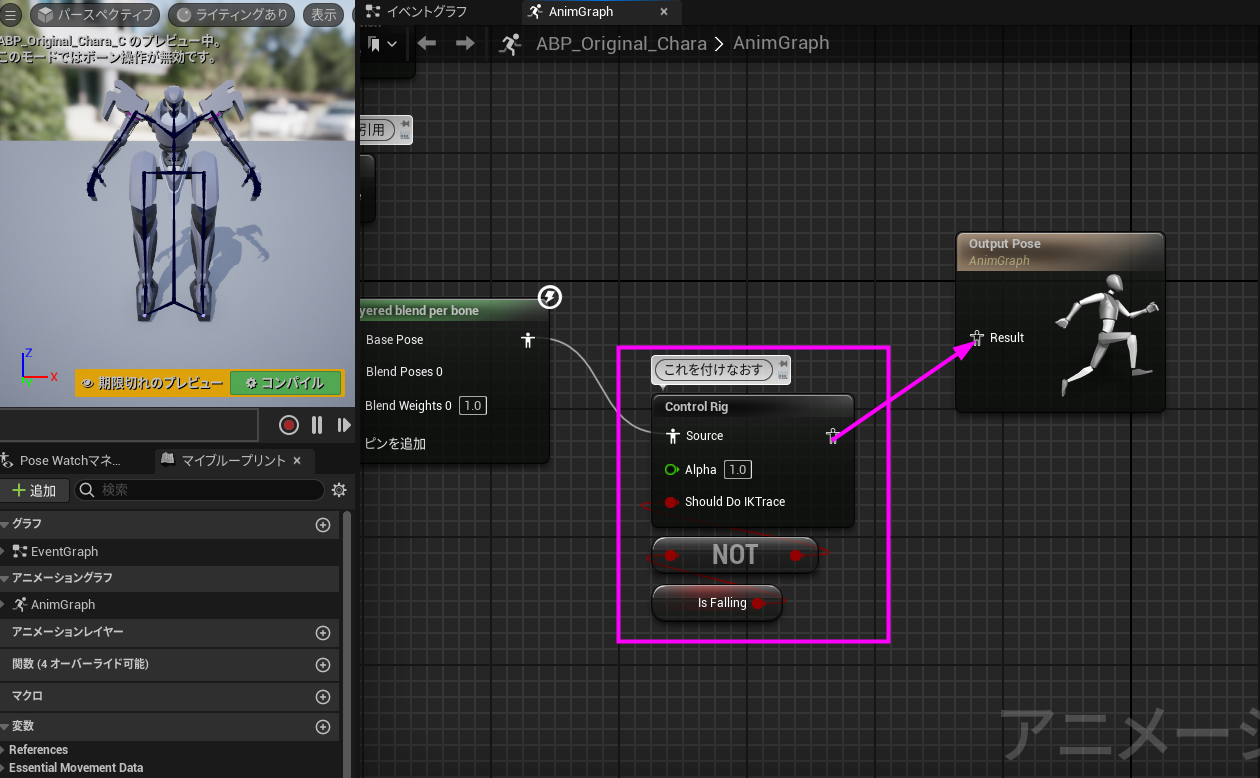
付けたら
「Control Rigノード」を選択して
「詳細」⇒「Contrl Rig」⇒「アセットをブラウズ」
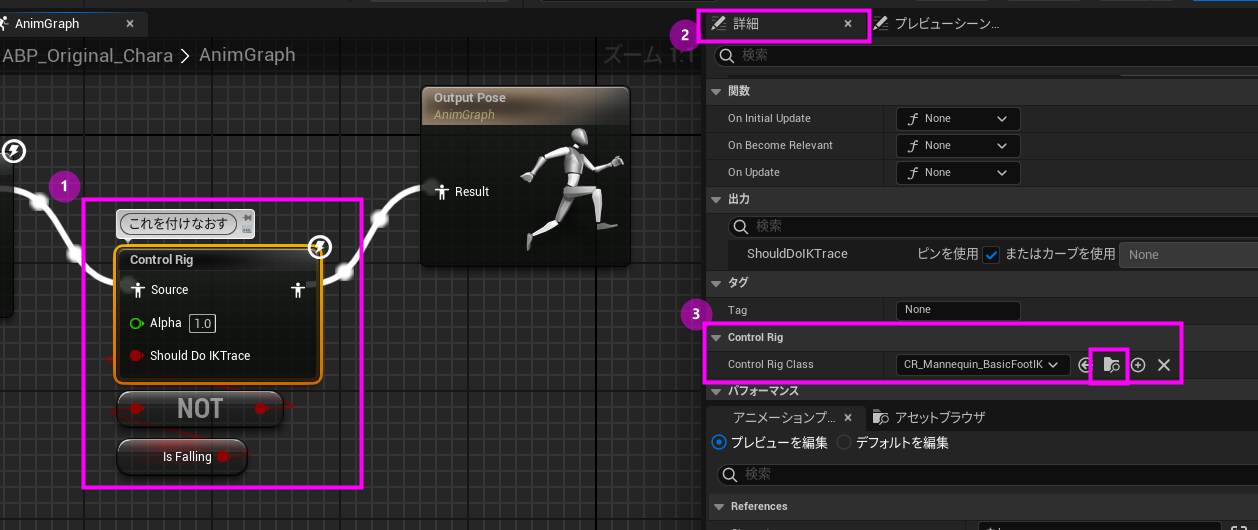
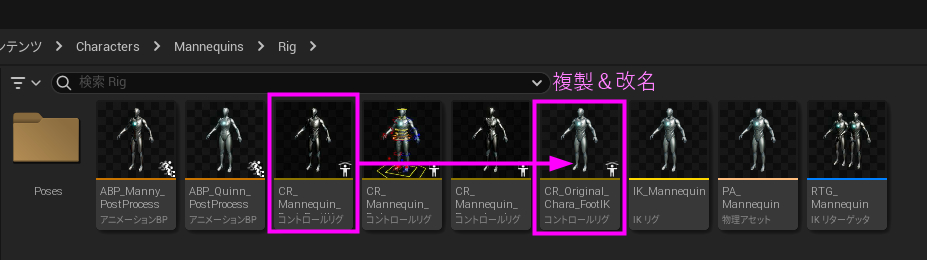
「コンテンツブラウザ」に「Control Rig BP」があるので
バックアップのため「一度複製&命名」してから開こう
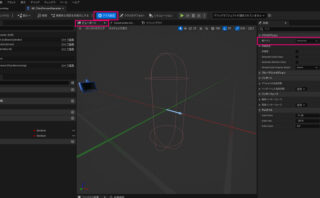
開くとこんな画面になるよ
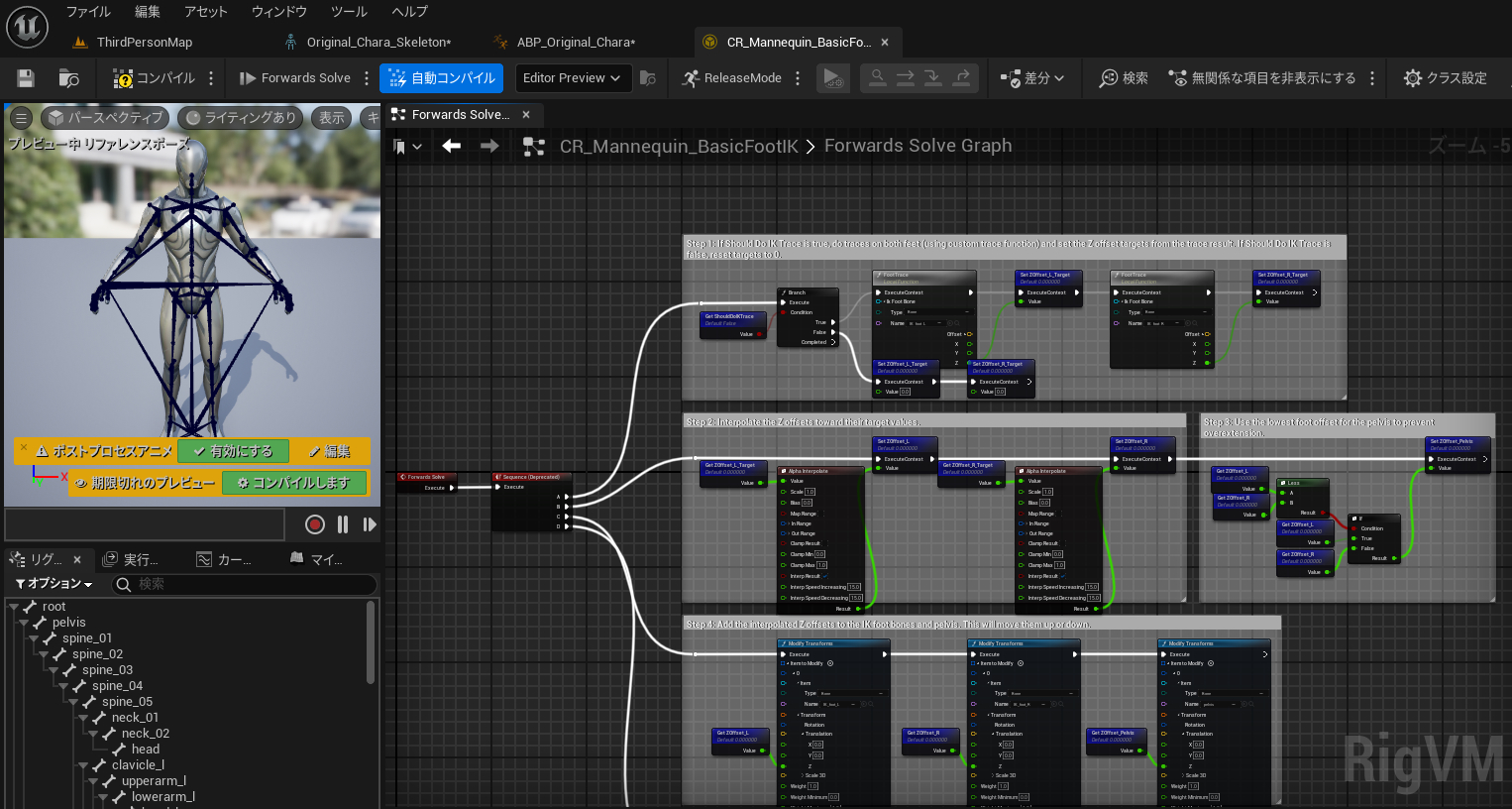
いま「UE5 Mannequin」のための「Foot IK」になってるので
「オリジナルモデル」用に「メッシュ」を差し替えよう
まずは「左下」、「リグ(階層)」にて
「root」を選択して「右クリック」し
「更新」⇒「オリジナルキャラのメッシュ」を選択
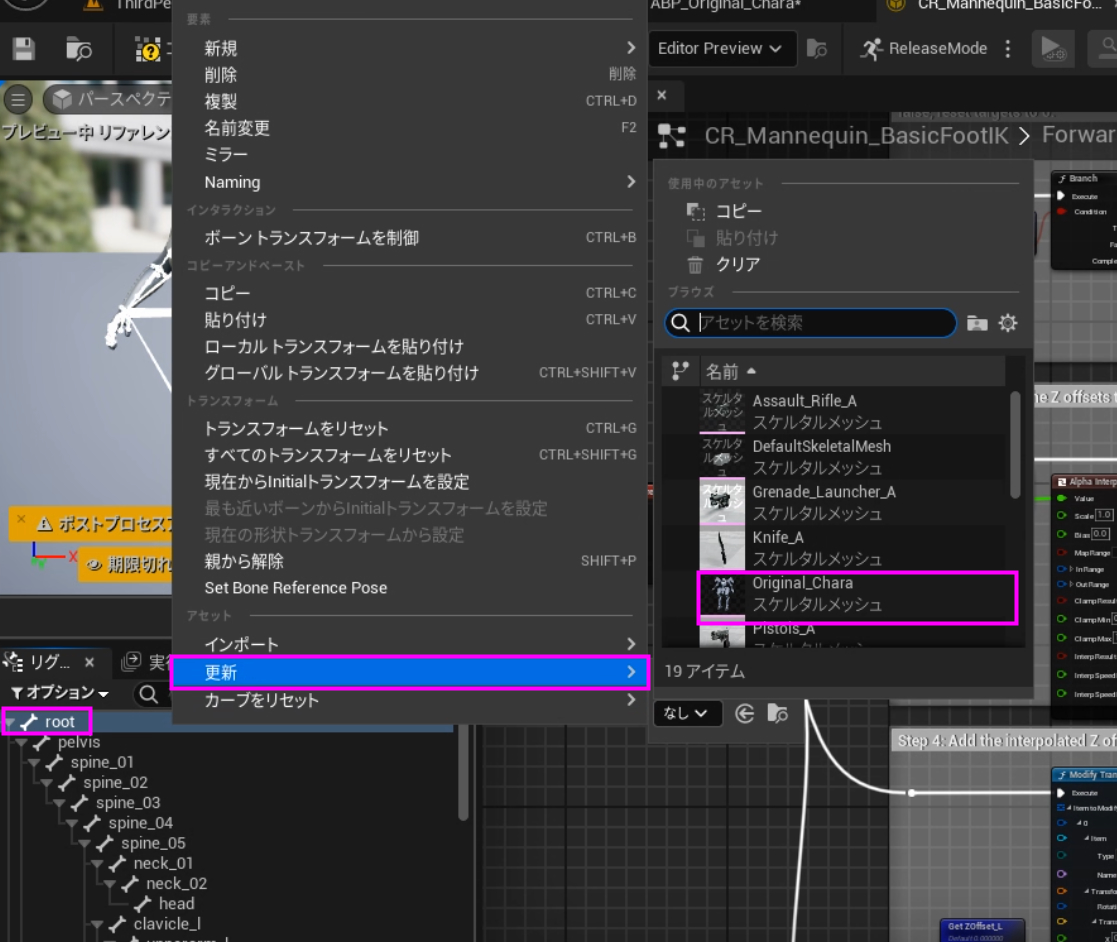
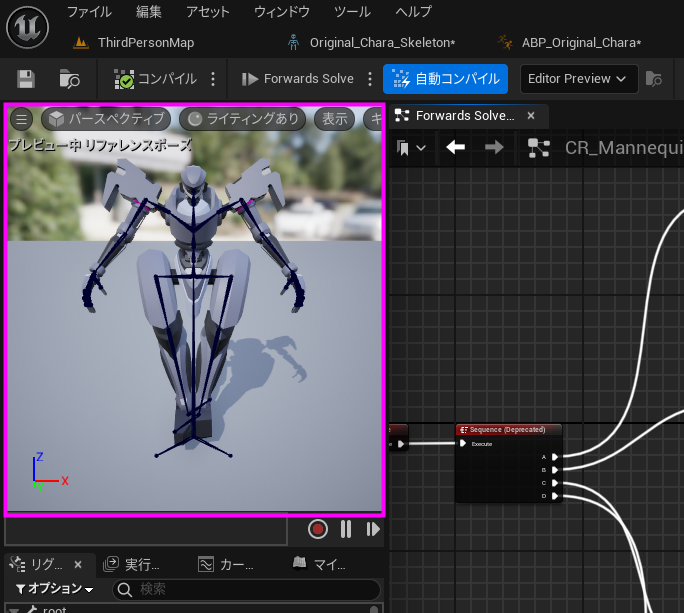
変更すると「プレビュー画面」のモデルが「オリジナルモデル」に切り替わるよ
ただ、ポーズがデフォルトのポーズとは違う「おかしな姿勢」になってるね
この問題は
さっき作った「仮想ボーン」を「Control Rigのノード」に割り当てることで解決できるよ
では早速「仮想ボーン」を「Control Rigのノード」に割り当てよう!
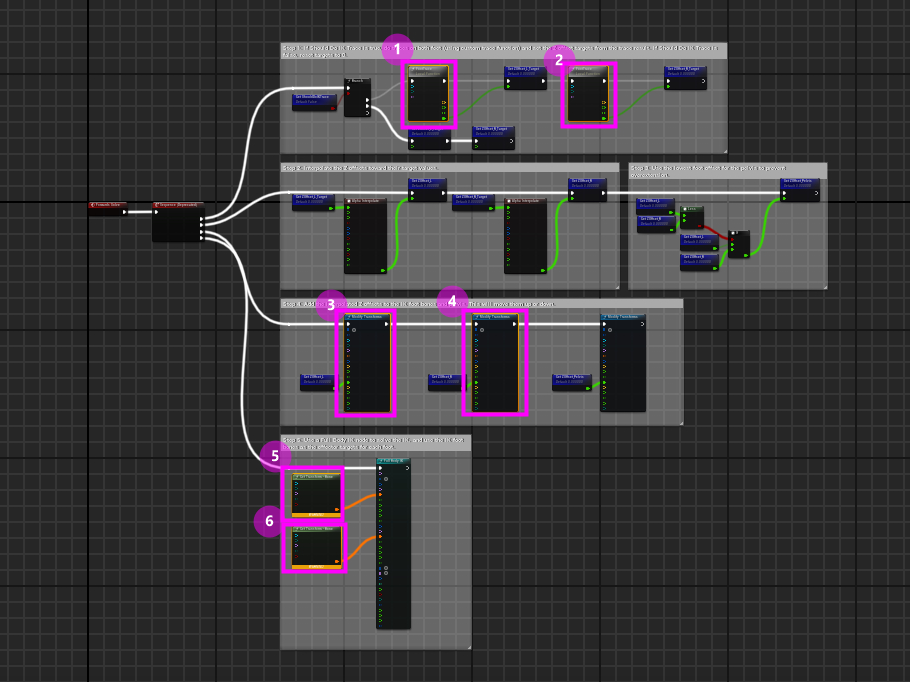
「Control Rig」のノード内から以下の単語を探し当てて変更していってね
- 「IK_foot_L」 → 「VB ik_foot_l」
- 「IK_foot_R」 → 「VB ik_foot_r」
変更前のノードはエラーを起こしてて、わかりやすく「赤文字」で表示してくれてるよ
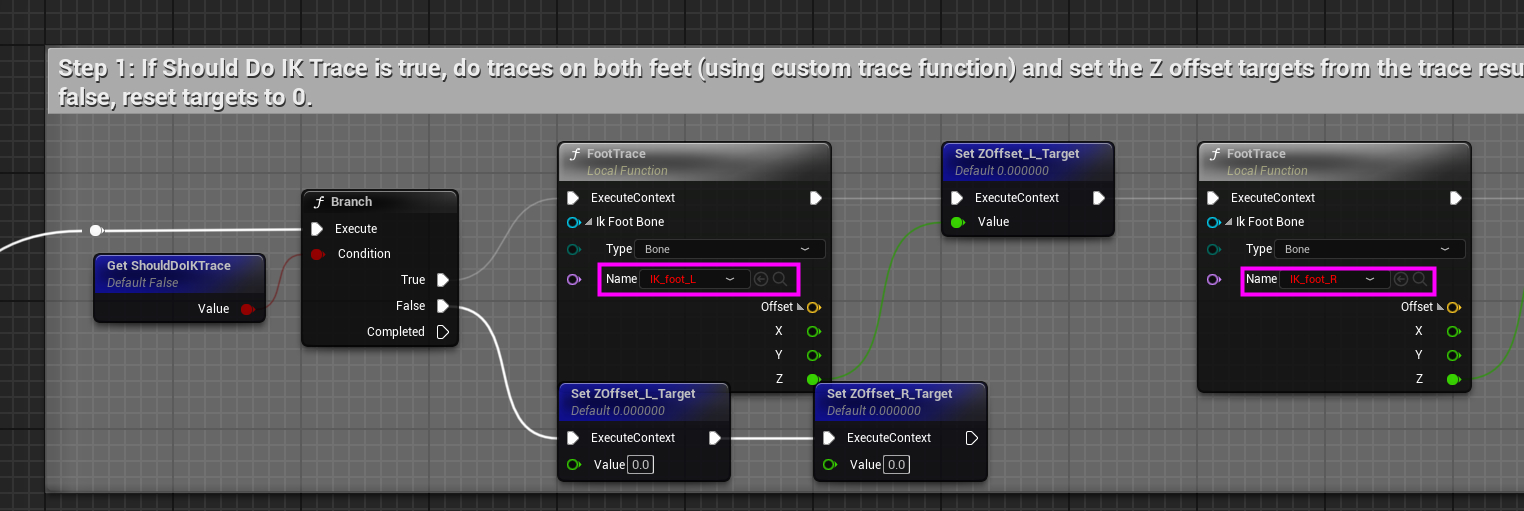
変更すれば「白文字」になるので
ノード全体を見渡してすべての「赤文字」を白くしていこう
これらノードを「VB ik_foot_l/r」に名前を変更すればOKだ
設定し終わったら「コンパイル」を押そう
ポーズが正常な形に切り替わるはずだよ

これで「仮想ボーン」の「Foot IK」適応OKだ
最後に「Control Rig BP」を「アニメーションBP」に割り当てれば準備完了だよ
赤文字がまだある際は
ちなみに、もし「VB ik_foot_l/r」のボーン「以外」が赤文字エラーを起こしていたら
それは「オリジナルモデルのボーン名」が違うせいだ
「デフォルトのボーン」は改名できないから
「UE5 Mannequinのスケルトン」と見比べて、該当するボーンの名前をノードに割り当てよう
ちなみに、下の記事はボーン命名について書いてあるので
よかったら参考にしてね
プレイしてみる
設定が完了したので早速プレイだ!
うん!しっかり足が階段の段差に合わせてるね!
これにて「Foot IK」の設定完了だ!
やったね!
おわりに
以上!
【UE5】1歩1歩の段差を歩く!Foot IKを足に仕込もう! 【Control Rig】
でした!
この記事を読んでくれた方、
「リターゲットしよう!その1、その2」からきてくれた方!
ここまで読んでくれてありがとう!
それでは次の記事にて、またね!


コメント